Tunnikava on valminud Euroopa Liidu Euroopa Sotsiaalfondi meetme "Kaasaegse ja uuendusliku õppevara arendamine ja kasutuselevõtt" raames

|
|
|
Tunnikava autoriks on Marika Reinmets (robootika- ja informaatikaõpetaja, TÜ doktorant)
"Micro:biti robot"

|
Teema tutvustus
Antud tunni käigus ehitame omale roboti, mille mootorite juhtimiseks kasutame BBC Micro:bitti ning õpime seda robotit programmeerima.
Tund on mõeldud eelkõige põhikooli õpilastele ning selle käigus saaks lõimida tehnoloogiaõpetust (roboti kavandamine ja ehitamine), füüsikat (elektriühendused) ning informaatikat (programmeerimine). Sama teemat on aga võimalik kasutada ka gümnaasiumi valikainete või IKT alaste huviringide tundides, varieerides roboti ehitamiseks kasutatavaid meetodeid vastavalt õpilaste teadmistele ja oskustele - enda kavandatud ja 3D prinditud roboti šassii versus pappkarbist kerega robot. |
Vajaminevad materjalid ja vahendid
Roboti ehitamiseks läheb kindlasti vaja järgmisi vahendeid ja materjale:
BBC Micro:bit koos USB kaabliga
|
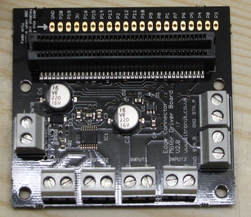
Mootorite kontroller micro:biti pesaga
|

Mootorid ja rattad (+ juhtmed)
|

|

|

|
|
Patareipesa
|
Patareid
|
Kruvikeerajad ja nuga
|

Vahendid roboti kere ehitamiseks või...
|

...valmis šassii
|

USB/mikroUSB kaabel micro:biti programmeerimiseks
|
Töö etapid
|
|
Tutvumine micro:bitiga
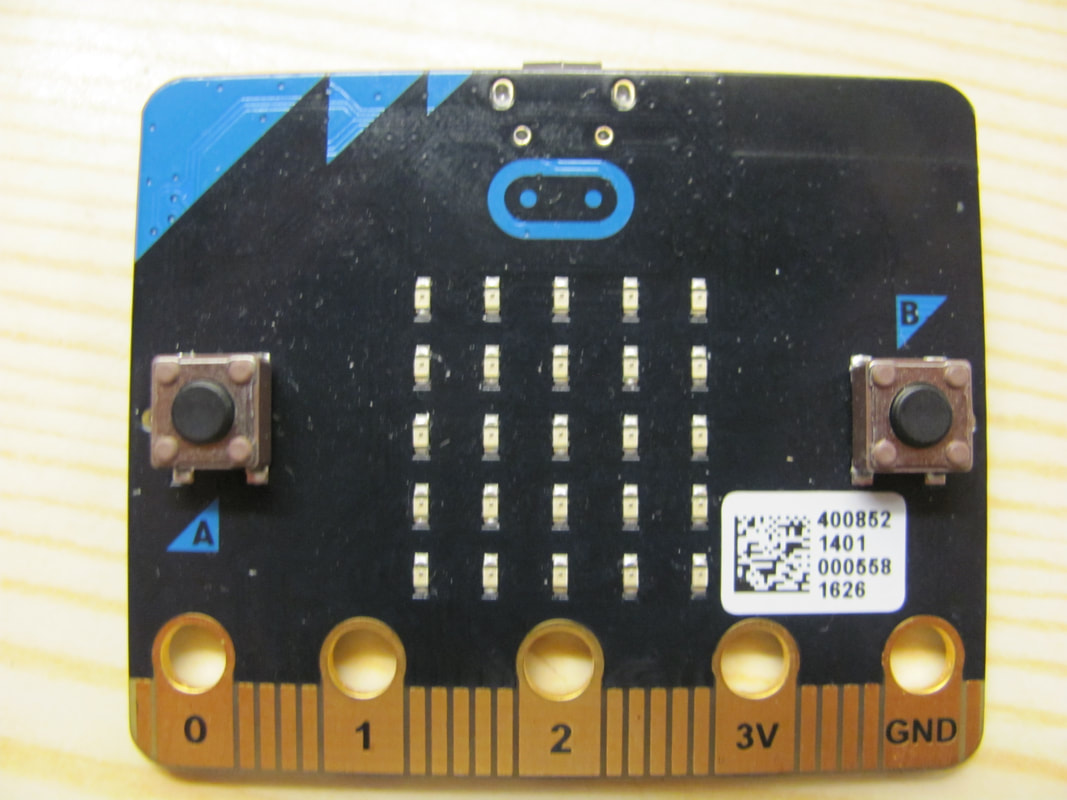
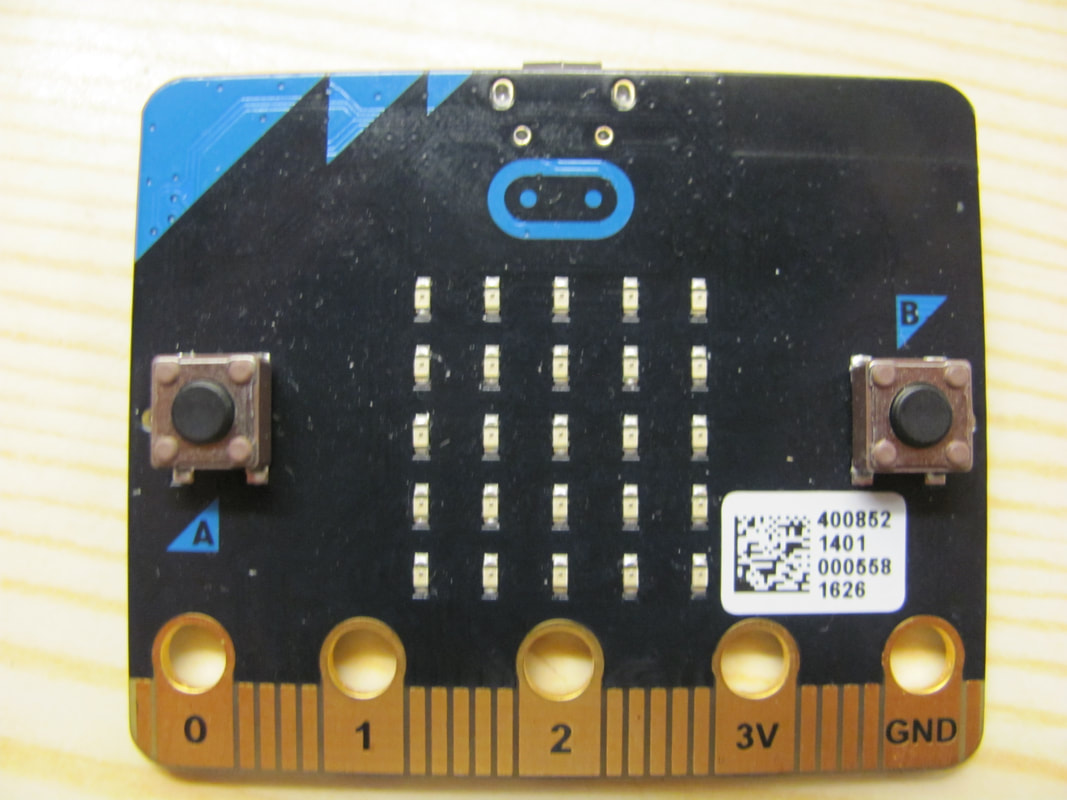
BBC Micro:bit on pisike, poole pangakaardi suurune miniarvuti, mis tuli vabamüügile 2016.a suvel. Micro:bit loodi eelkõige kui väike ja odav nutiseade, mille abil saaksid lapsed varakult teha tutvust programmeerimismaailmaga.
|

|
Micro:biti esiküljel on 25 ledi mis paiknevad 5x5 maatriksina. Lisaks on nupud A ja B, mida saab programmi töös kasutada. Micro:biti alläärel on ümmarguste aukudega klemmide rida, mille asetamisel vastavasse kontrolleripessa, saab micro:biti abil programmeerida mootorite vmt lisaseadmete tööd ilma, et peaks kasutama selleks lisajuhtmeid. Micro:biti tagakülje ülaäärel on valge led, mis annab infot sellest, kas toidet parasjagu on või et toimub programmi üleslaadimine. Tagaküljel paiknevad ka reseti nupp, pesad toite ja microUSB juhtmete jaoks, kompass, kiirendusandur ja. protsessor.
Micro:biti kohta võid rohkem teada saada veebilehelt microbit.org
Roboti kavandamine ja ehitamine
Roboti kavandamisel ja ehitamisel tuleks lähtuda oma võimalustest ja oskustest. Roboti mootorid ja rattad võib kinnitada lihtsalt sobivas suuruses papp- või plastikkarbi külgedele, võib kasutada plastikust spetsiaalseid aluseid roboti detailide kinnitamiseks, aga võib ka osa oma roboti detaile printida välja 3D printeriga, kui selleks teadmisi ja oskusi on.
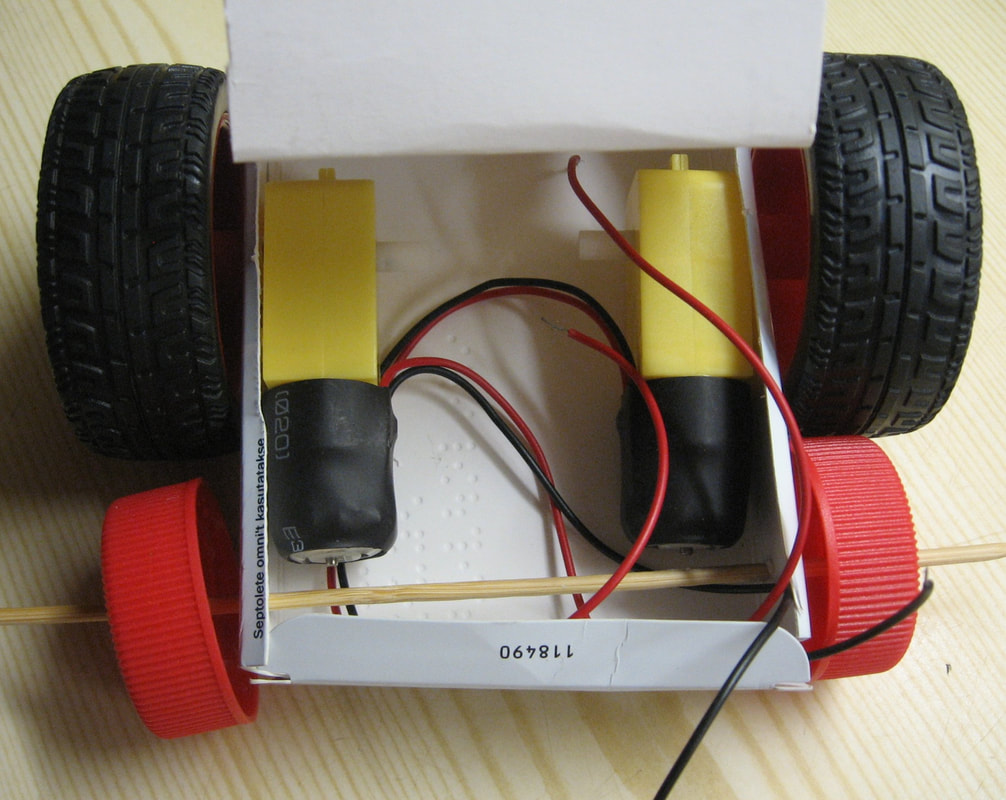
Selle roboti mootorid ja rattad on kinnitatud väikese pappkarbi külge. Ta ei sõida otse, sest rattad pole paralleelselt. Lisaks puutub üks tugiratastest sõidu ajal suure ratta vastu.
|
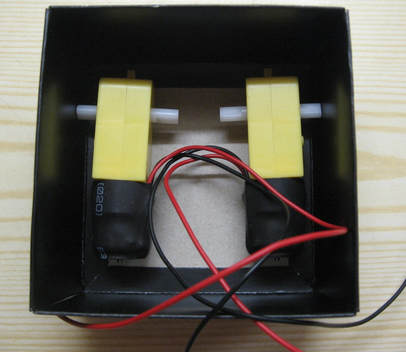
Need mootorid mahuvad üsna täpselt tugevate seintega karpi. Järgmine samm oleks nüüd augu tegemine karbi seina sisse, et saaks rattad mootori võllide külge panna.
|
|
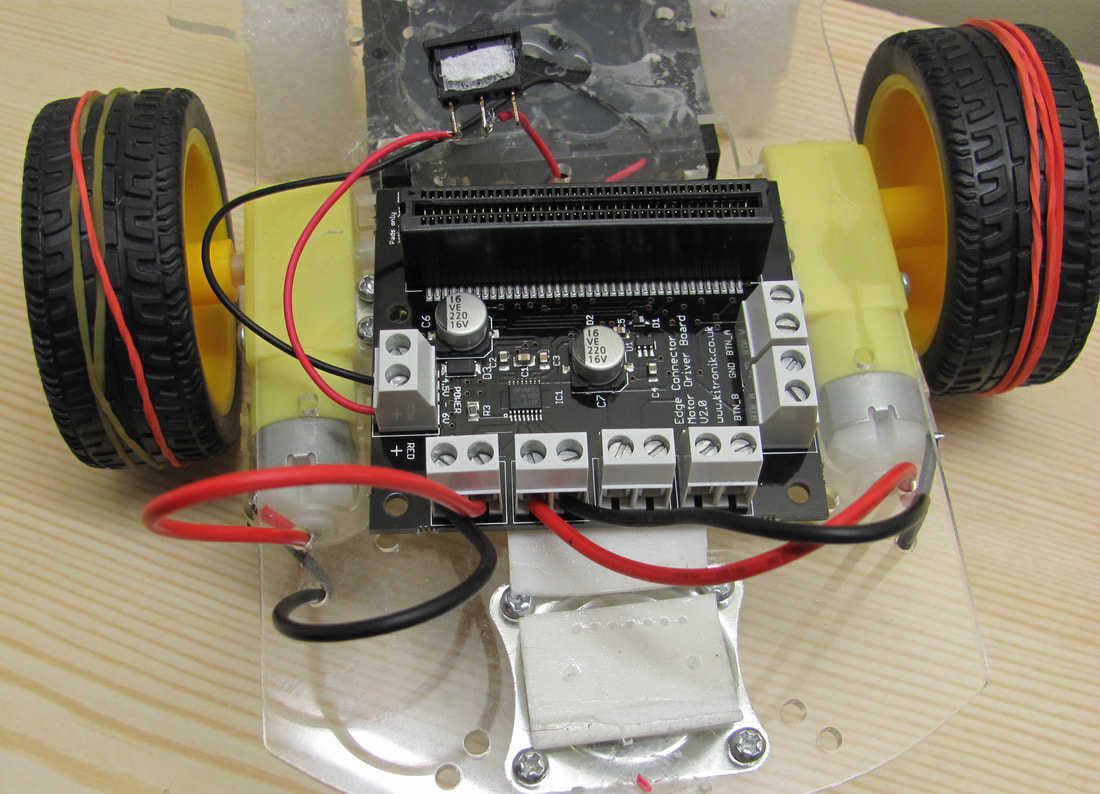
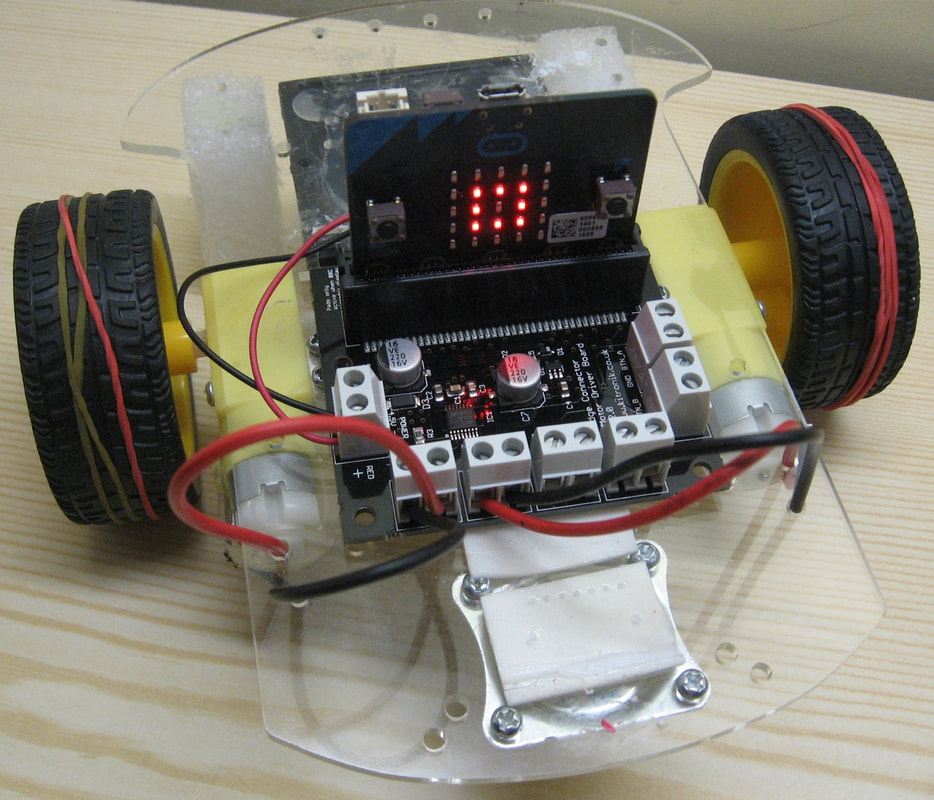
Selle roboti ehitamise juures on kasutatud valmis šassiid - elektroonikapoest ostetud robotauto aluskomplekti koos mootorite, rataste ja kinnitustega. Lisaks on robotil ees ka kolmas tugiratas, mis kinnitub läbipaistvast plastikust raami külge väikeste metallist kruvidega Mootorid paiknevad raamist allpool ning nende juurest tulevad juhtmed on toodud raamil asuva kontrolleri juurde läbi raami sees olevate aukude. Rataste ümber on pandud kummirõngad, et rattad libedal lauapinnal paremini haakuksid. |
Juhtmete ühendamine kontrolleri külge
|
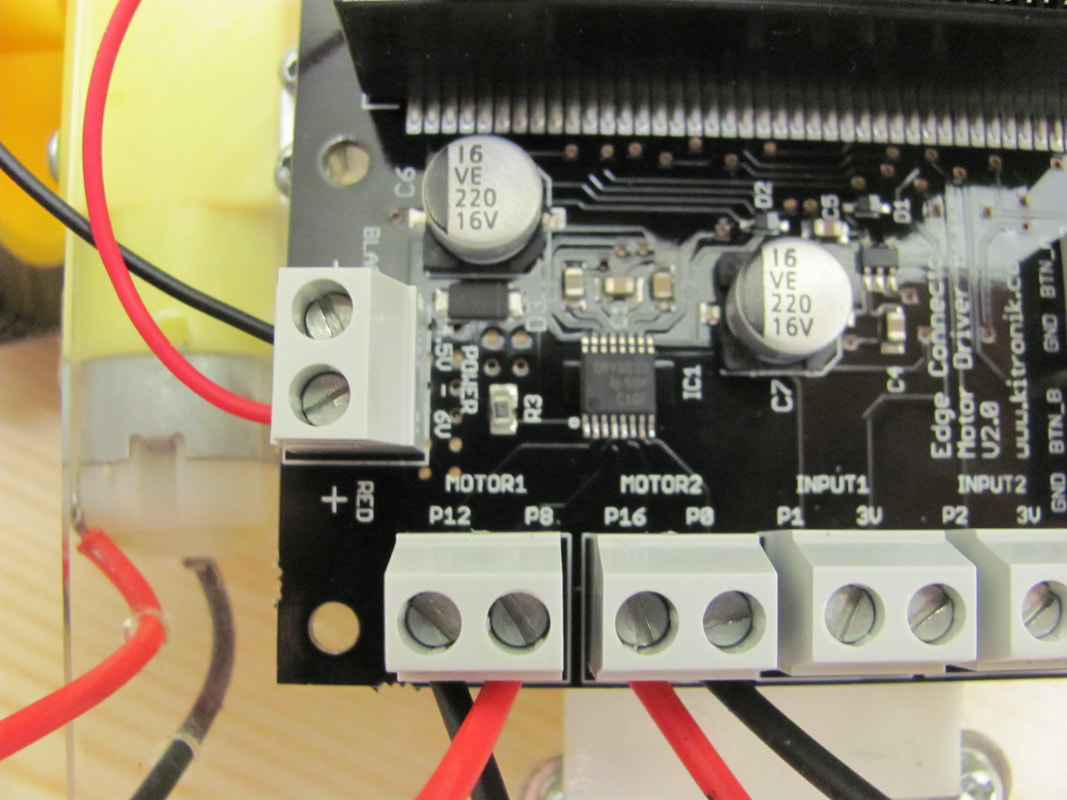
Patareipesalt tulevad toitejuhtmed tuleb ühendada kontrolleri ühel küljel paikneva üksiku valge klemmipaari külge (vastasküljel on 2 samasugust). Sinna, kuhu läheb punane(+) juhe, on kirjutatud "red", musta (-) juhtme ühenduskoht on tähistatud kirjaga "black".
Parempoolse mootori juhtmed ühenda "motor1" tähisega klemmide juurde, vasakpoolse mootori juhtmed "motor2" juurde. Kui hiljem robotit testides selgub, et robot pöörleb otsesõitmise asemel kohapeal, on vaja ühe mootori juhtmete klemmid vastastikku ära vahetada. Ühendamiseks torka juhe, mille otsast on ca 0,5cm ulatuses isolatsioon eemaldatud, lihtsalt otsapidi õigesse pessa, hoia teda seal paigal, keerates samal ajal peenikese lapiku kruvikeerajaga kinni juhet hoidev klemm. |
Micro:bit-roboti programmi programmeerimine
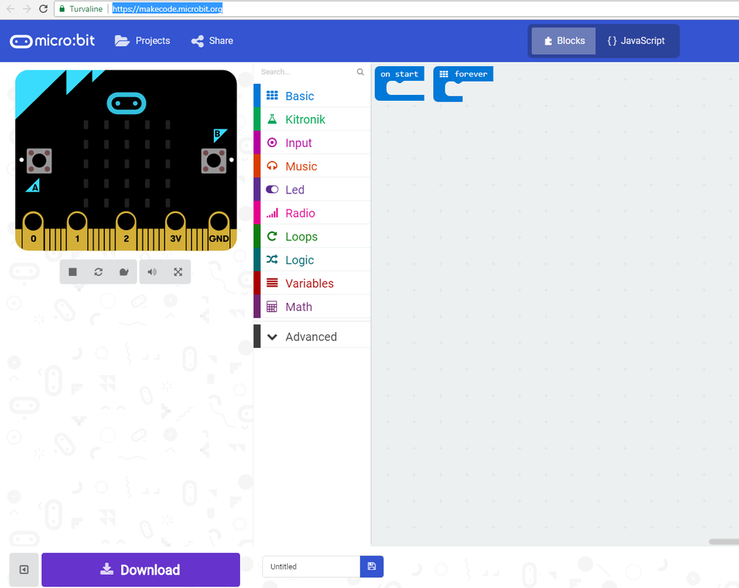
- Mine veebilehele microbit.org ja vali sealt "Let´s code" ning Java Script Let´s Code ning Sinu ees avaneb micro:biti programmeerimiskeskkond, saad minna ka siit otse: makecode.microbit.org
- Selleks, et saaksid micro:biti abil robotit juhtida, on vaja täiendavalt (ainult üks kord, edaspidi pole uuesti vaja) käivitada lisamoodulid, mis seda võimaldavad.
- Otsi ekraani paremas ülanurgas üles hammasratta kujutis ning kliki sellel. Avanevast rippmenüüst vali "Add package". Avaneva akna tühjale ülemisele reale kirjuta "kitronik" (kuna kasutame selle tootja kontrollerit" ja vajuta enter". Sinu ette tuleb 2 valikut, millest valid "kitronik-motor-driver". Selle tulemusena tekkis sinu micro:biti programmeerimisvahendite nimistusse juurde rohelist värvi Kitronik nimeline plokk, mille all paiknevad rohelist värvi käsuplokid, mille abil saad juhtida mootorite tegevust
Micro:biti programmeerimiskeskkonna vaade
Programmeerimine
Programmi loomiseks lohista hiirega omale vajalikud programmiplokid halli värvi programmiaknasse. Kui oled vähemalt korra elus varem scratchiga programmeerinud, ei tohiks ka micro:biti programmeerimine Sul üle jõu käia. Vaata ka allpool olevaid vihjeid
|
Katsetamisülesanne
|
Mõned abistavad vihjed
|
Üks võimalik programm selle ülesande täitmiseks näeb välja näiteks selline: programm
Programmi laadimine arvutist micro:bitti
- Kui soovid, pane oma programmile nimi (ekraani allääres, keskkohast veidi paremal)
- Vajuta nuppu "download" (või "save" või "done" - sõltub arvutist)
- ühenda arvuti ja micro:bit omavahel USB kaabli abil
- ava oma arvutis allalaetud failide kaust
- otsi oma programm üles (viimane hex-laiendiga fail)
- otsi kataloogipuust üles micro:bit
- lohista hiirega (või sõrmega, kui on puutetundlik ekraan) oma programm micro:biti peale
- oota, kuni micro:biti tagaküljel olev led-tuluke lõpetab värelemise
Micro:bit-roboti käivitamine
- Võta micro:biti küljest lahti programmi allalaadimiseks kasutatud USB juhe
- Aseta micro:bit aukudega äärt pidi otse kontrolleri peal olevasse pilukujulisse pessa (vajuta ühtlaselt, aga tugevalt - ta läheb sisse ainult otse), nii et micro:bit jääb kontrolleri plaadile püsti seisma
- aseta oma robot põrandale või suurele lauale
- kui su roboti patareipesal või plaadil on eraldi toitelüliti, siis lülita see sisse
- käivita oma robot, vajutades micro:bitil olevat nuppu A või B, nii nagu eelnevalt programmeerisid
- (kui su programmi alguses polnud nupulevajutust ette nähtud, siis tõenäoliselt sa selle punktini ei jõua, sest sa juba jooksed oma robotile järgi)
Ja nii ta sõidabki!
Raskem (kodune) ülesanne
Aseta põrandale ritta mingid esemed (nt papist joogitopsid, legoklotsid vmt), märgi kleeplindiga maha stardijoon ning tee oma robotile selline programm, mille abil ta sõidaks nende topside vahel slaalomit.
Kutsu ka sõber oma robotiga koos sinu robotiga võidu sõitma, sest nii on lõbusam!
Kutsu ka sõber oma robotiga koos sinu robotiga võidu sõitma, sest nii on lõbusam!
